
- Imballaggio - Logistica - Movimentazione
- Movimentazione e Sollevamento
- Pinza di presa pneumatica
- Hangzhou FOUK Mechanical Technology Co., Ltd.
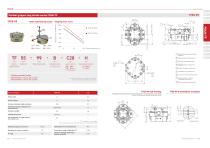
Pinza di presa pneumatica TF55-99parallelaa 4 griffeper robot industriali

Aggiungi ai preferiti
Confronta con altri prodotti
Caratteristiche
- Azionamento
- pneumatica
- Tipo
- parallela
- Numero di griffe
- a 4 griffe
- Tipo di prodotti
- per robot industriali
- Caratteristiche e opzioni
- a 4 dita
- Forza di prensione
186 N, 200 N
- Corsa
8 mm
(0,315 in)
Descrizione
Opzioni di configurazione:
B: Ventilazione sul fondo
C28: Lunghezza dell'asta di spinta
H: Resistenza alle alte temperature
La pinza di centraggio pneumatica a quattro dita, con struttura portante a forma di T, supporta diverse piastre di spinta. La sua molla di tempra ha una vita utile di oltre 500.000 volte. La forza di presa della pinza a quattro dita è uniforme, in grado di afferrare in modo stabile gli oggetti e di prevenire i danni.
---
Cataloghi
TF55-99
1 Pagine
Altri prodotti Hangzhou FOUK Mechanical Technology Co., Ltd.
Pneumatic Grippers
































Ricerche correlate
- Pinza di presa pneumatica
- Pinza di presa parallela
- Pinza di presa a 2 griffe
- Pinza di presa per robot industriali
- Pinza di presa a 3 griffe
- Pinza di presa angolare
- Pinza di presa concentrica
- Pinza di presa leggera
- Pinza di presa a corsa lunga
- Pinza di presa a 4 griffe
- Pinza di presa a 2 dita
- Pinza di presa a 3 dita
- Pinza di presa idraulica
- Pinza di presa a 4 dita
- Modulo prensile
- Pinza di presa a tenuta stagna
- Pinza di presa flessibile
- Pinza di presa industriale
- Modulo prensile pneumatico
- Modulo prensile per robot collaborativi
* I prezzi non includono tasse, spese di consegna, dazi doganali, né eventuali costi d'installazione o di attivazione. I prezzi vengono proposti a titolo indicativo e possono subire modifiche in base al Paese, al prezzo stesso delle materie prime e al tasso di cambio.